

In the realm of mobility aids, powered wheelchairs represent a significant advancement in technology, providing freedom and independence to individuals with mobility challenges. However, conventional powered wheelchairs come with their limitations, chiefly their inability to navigate stairs and the requirement for users to remain in a seated position throughout their use. Addressing these challenges, the Korea Institute of Machinery and Materials (KIMM) has introduced an experimental robotic wheelchair that promises to revolutionize the way individuals with mobility impairments interact with their environments.
Led by Dr. Chan-hoon Park, the team at KIMM has developed a wheelchair that not only facilitates stair climbing but also enables users to change their posture according to their needs. The design integrates two main components: a stair-climbing “crawler” module and a standing module, both aimed at enhancing user mobility and comfort.
The stair-climbing feature of the wheelchair is particularly noteworthy. Unlike previous models that may struggle with stability on stairs, this wheelchair employs a rubber-tracked crawler module that can extend and adjust its angle to maintain a level orientation for the user, even on inclined surfaces. This module utilizes four sets of tracks—two at the front and two at the rear—to securely grip the edges and treadboard platforms of stairs, significantly reducing the risk of slipping. This mechanism ensures a safer and more reliable means of navigating staircases, a common barrier in public and private spaces.
Equally innovative is the wheelchair’s standing module. This powered parallelogram-shaped structure allows users to adjust their posture into standing, reclining, and leaning positions, as well as offering the option to be elevated while seated. This flexibility is not just a matter of convenience; it plays a crucial role in preventing health issues such as bedsores and poor circulation, which can arise from prolonged periods in a single position. By enabling movement and changes in posture, the robotic wheelchair contributes to the overall well-being of its users.

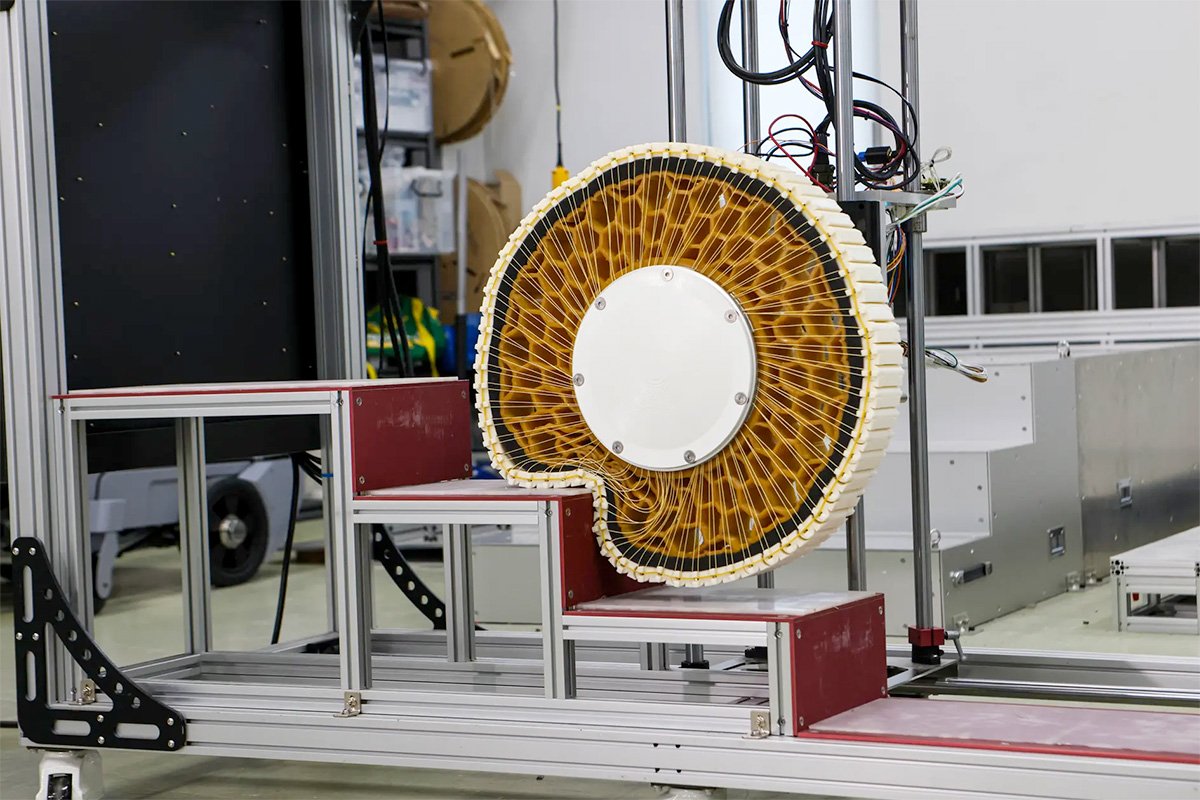
Further enhancing the wheelchair’s capabilities are the special “transforming wheels” developed by Park and his team. Inspired by the surface tension observed in water droplets, these wheels have the ability to adapt their shape to overcome obstacles, including stairs. This innovative feature, although not yet integrated into the chair, holds the potential to augment or even replace the stair-climbing module, offering a smoother transition over varied terrains.
Dr. Park emphasizes that the driving force behind this technology is to make infrastructure more accessible to individuals with lower-limb disabilities. The wheelchair is designed not just for mobility but to enable users to fully engage with facilities and environments that were not originally designed with their needs in mind.
As for pricing information, details have not been disclosed at this stage, given the experimental nature of the wheelchair. It is anticipated that further development and testing will precede any commercial availability, at which point cost considerations will become clearer.
This robotic wheelchair represents a significant step forward in assistive technology, promising to enhance the quality of life for individuals with mobility impairments by offering greater independence and access to environments that were previously challenging to navigate.
Source: KIMM


{kind=link}