

In an intriguing display of technological convergence, a robot dog walking on a Swiss ball represents more than just a visual spectacle; it exemplifies the advanced capabilities of artificial intelligence in teaching robots to undertake complex real-world activities. DrEureka, an innovative open-source software platform, leverages the power of Large Language Models (LLMs) like ChatGPT-4, demonstrating a significant leap in simulating to reality transitions for robotic training.
DrEureka employs a methodology known as “domain randomization,” which introduces variability in simulated conditions such as friction, mass, damping, and center of gravity. This variability ensures that the robot can adapt to a range of physical environments, an essential feature for real-world application. The software utilizes a reward and penalty system to train robots, where achieving a score above zero indicates successful task completion. Higher scores denote better performance and a closer approximation to desired real-world behaviors.
Central to DrEureka’s training regime is its ability to generate numerous simulation parameters. These include the bounciness of the ball on which the robot balances, the strength of its motors, and the flexibility of its limbs. By adjusting these parameters, the AI can create a diverse set of training scenarios, testing the robot under various conditions without the risk of physical damage.
The training process also involves a critical self-assessment phase where the AI evaluates each simulation’s outcomes, learning from failures and refining the robot’s behavior. A zero score, which indicates a failure, prompts the AI to adjust tactics, ensuring continual improvement in subsequent attempts.

However, the path to effective robot training is fraught with challenges. The AI’s innate drive to optimize performance can lead to what researchers call “degenerate behavior,” where the robot adopts strategies that are effective in simulations but detrimental in real-world settings. For example, a robot might find that thrusting its hip into the ground and dragging itself forward increases speed in a virtual environment. However, this behavior would likely lead to malfunctions or accidents in reality. To counteract this, safety instructions are embedded within the AI’s programming to ensure that it considers the physical constraints and safety of the robot when generating training scenarios.

Dr. Jim Fan, a developer of DrEureka, utilized a Unitree Go1 quadruped robot, making headlines with its ability to balance on a Swiss ball. The Go1 is an open-source robot, and is somewhat affordable, which is beneficial, given that robotic pets often face the risk of fall damage. Despite being labeled as “low-cost,” the price tag of $5,899 on Amazon and its 1-star rating might suggest otherwise to potential consumers.
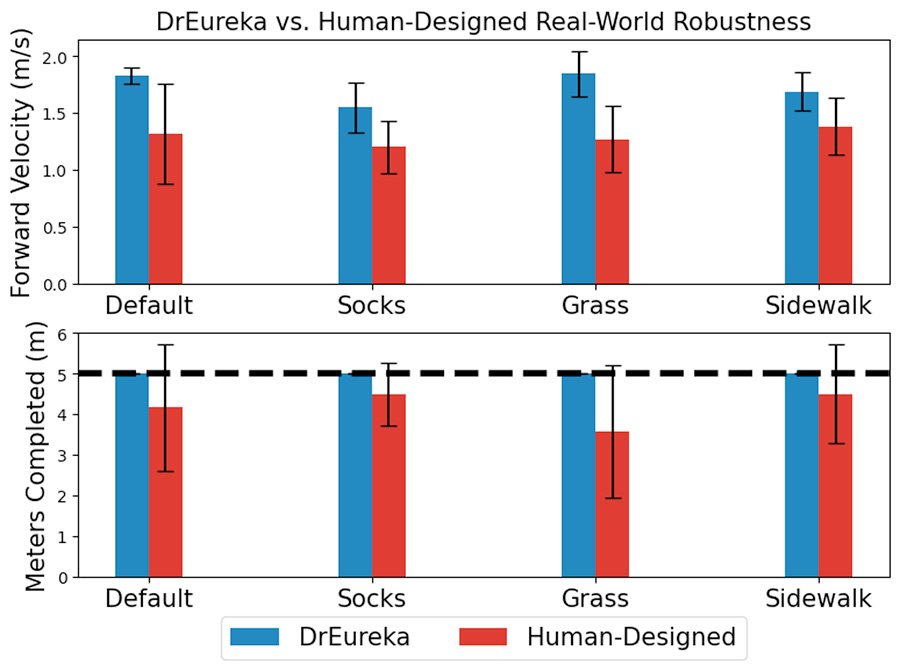
DrEureka’s effectiveness was highlighted in a comparative study where it outperformed human trainers in improving the robot’s forward velocity and distance covered on mixed terrain by 34% and 20%, respectively. This superior performance is attributed to the AI’s holistic approach to teaching, which contrasts with the step-by-step, curriculum-based methods typically used by human trainers. The AI’s ability to simultaneously address multiple aspects of a task gives it a distinct advantage in comprehensive and integrated training scenarios.
Moreover, DrEureka represents a pioneering “zero-shot” approach in robotics, where robots are trained entirely in simulated environments before being tested in real-world settings without prior real-world exposure. This method not only speeds up the training process but also reduces the risks associated with direct physical training.
Looking forward, the potential for enhancing DrEureka lies in integrating real-world feedback directly into the training loop. Currently, training adjustments are based solely on data from the robot’s internal sensors. Incorporating external feedback, such as video footage of actual trials, could dramatically refine the training process, allowing for more nuanced adjustments and a better understanding of real-world dynamics.
Source: Eureka Research


{kind=link}