

In an innovative step towards space exploration, a three-legged robot named SpaceHopper has successfully completed a crucial zero-gravity test on an aircraft, indicating potential for future missions on asteroids. Developed by students from ETH Zurich, the SpaceHopper project originated two and a half years ago with the goal of enhancing exploration on low-gravity celestial bodies, such as asteroids and moons.
The scientific community has long been fascinated by these celestial bodies due to their composition, which includes rare-earth metals and other substances that can provide insights into the formation of the universe. The SpaceHopper is designed to navigate these environments effectively, using its unique three-legged structure to maneuver and conduct research.
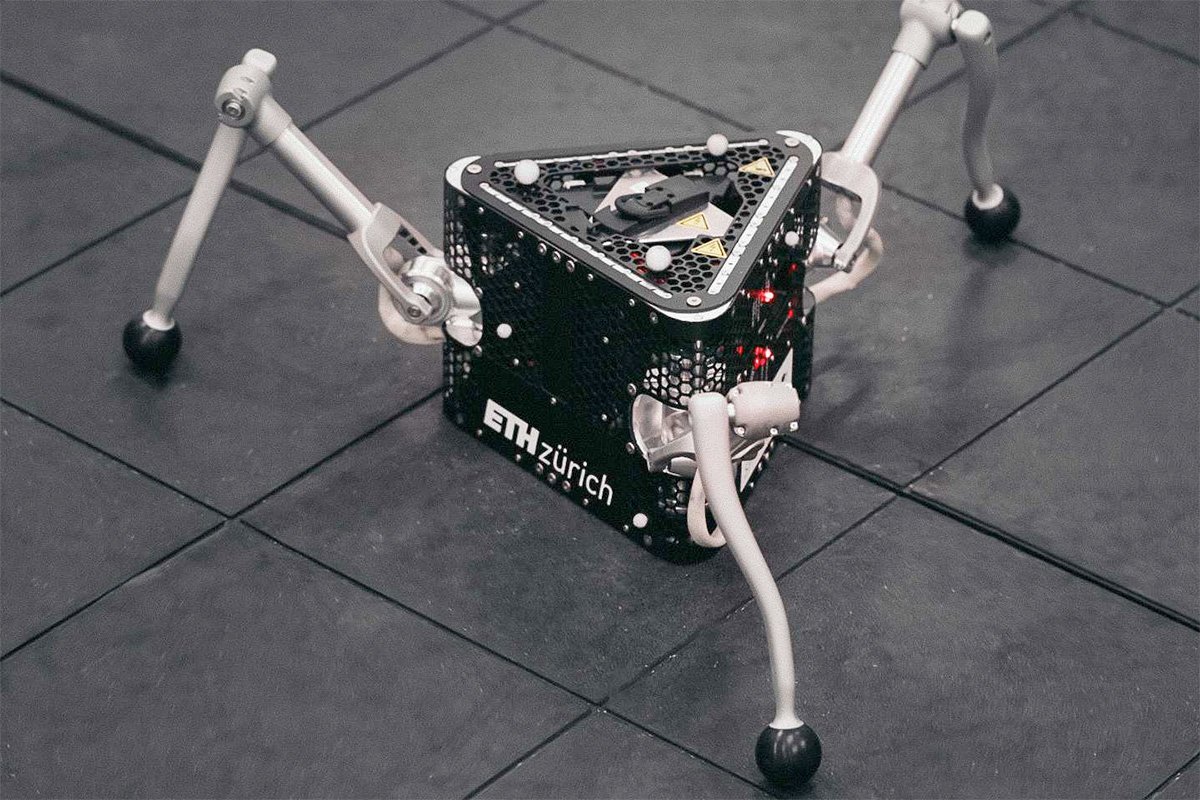
The robot features a triangular aerospace-aluminum body with an articulated leg at each corner, each equipped with a knee and a hip joint. These joints are powered by a total of nine motors—three for each leg. The differential drive mechanism on the hips and another motor for the knees allow for precise control over movement. This intricate setup enables the SpaceHopper to perform various functions critical for its operation in space, such as initiating jumps, maintaining orientation during flight, and executing controlled landings.
Deep-learning-based software installed on the robot orchestrates the legs’ movements. This technology is pivotal in ensuring that the robot can adjust its center of mass in mid-air by extending or withdrawing its legs, which helps maintain stability and orientation during the leap and subsequent landing. The legs are also designed to flex upon touchdown to absorb the impact and prevent the robot from toppling over.
Prior to the airborne testing, the SpaceHopper underwent preliminary evaluations in an ETH Zurich laboratory. These tests involved simulating the low-gravity conditions of the dwarf planet Ceres using a counterweight system and a spinning gimbal. This preparatory phase was crucial for ensuring the robot’s functionality before experiencing actual zero-gravity conditions.
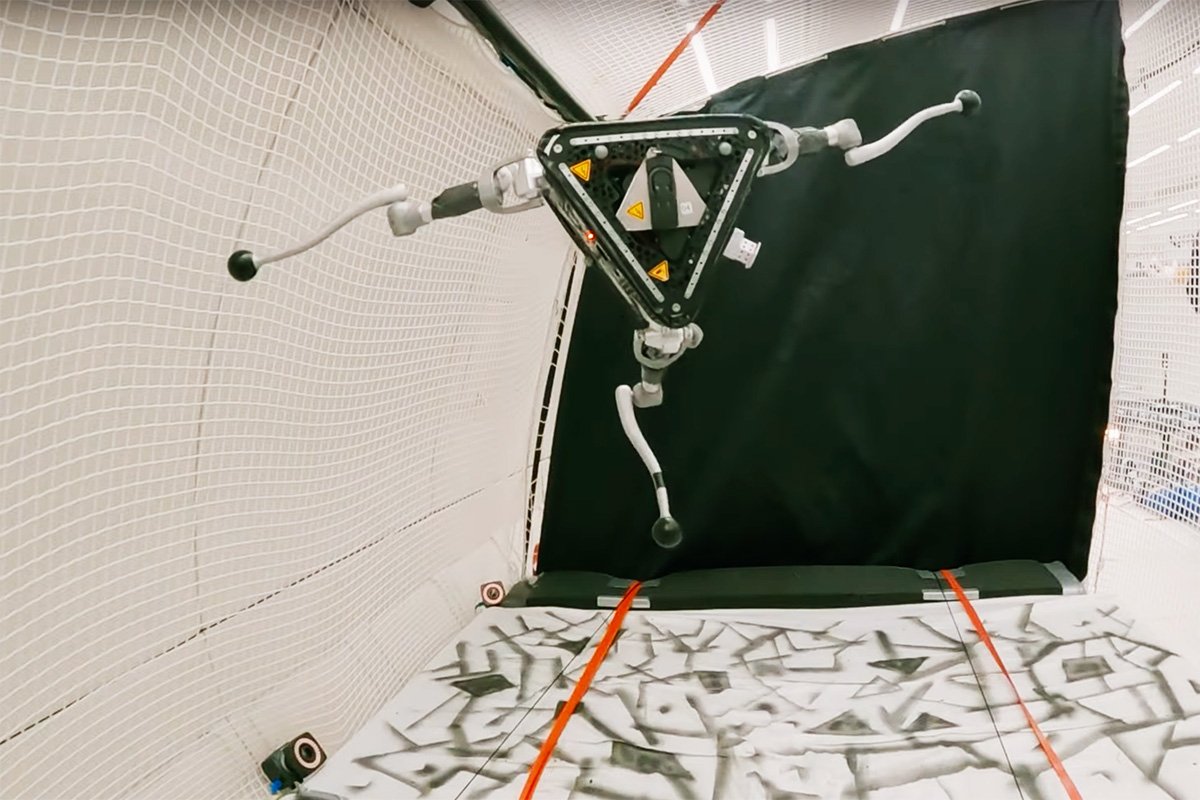
The real test of the robot’s capabilities came during a flight on the Air Zero G aircraft, operated by the European Space Agency and Novespace. During this flight, an Airbus A310 executed parabolic maneuvers to create short periods of weightlessness, mimicking the low-gravity environment of space. The SpaceHopper successfully demonstrated its ability to leap off the aircraft floor, navigate in a directed manner, and maintain its orientation while airborne.
This achievement builds on ETH Zurich’s previous work with the four-legged SpaceBok robot, designed for similar missions. The transition from four legs to three has allowed for a reduction in the SpaceHopper’s size and weight—now only 5.2 kg (11.5 lbs), light enough to be deployed from a small unmanned CubeSat spacecraft.
SpaceHopper’s successful tests mark significant progress in the development of technology for exploring celestial bodies. This advancement could lead to more effective and efficient space missions, potentially unlocking new opportunities for mining valuable minerals and deepening our understanding of the universe. The continued development and testing of such technology will be vital as we expand our reach into the cosmos.
Source: ETH Zurich


{kind=link}