

The Korea Advanced Institute of Science and Technology (KAIST) has developed an advanced wearable robot called the WalkON Suit F1, designed specifically for individuals with paraplegia. This latest version of the WalkON Suit addresses a significant issue seen in previous wearable robots—assistance needed to put the suit on.
By using a self-fitting approach, the WalkON Suit F1 provides users with a greater level of independence, allowing them to don the robot without help. This is a promising step for assistive robotics, with KAIST working alongside Angel Robotics to deliver a domestically produced, cutting-edge solution for those facing severe mobility challenges.
A new approach to wearable robotics
The WalkON Suit project dates back to 2015, and since then, KAIST has released several versions of the wearable robot. The earlier models, including the WalkON Suit 1 (introduced in 2016) and WalkON Suit 4 (released in 2020), have been developed for individuals with American Spinal Injury Association (ASIA) Impairment Scale A grade injuries, which represent the most severe form of paralysis. Each new model has aimed to improve the walking capabilities and usability for individuals with paraplegia.
The 2020 WalkON Suit 4 reached a walking speed of 3.2 km/h, which aligns with the natural walking pace of an able-bodied individual. This model was also able to help users navigate everyday obstacles, such as narrow corridors, doorways, and stairs. Despite these advancements, however, one major limitation persisted: users required assistance to put the robot on before they could walk independently.

Addressing independence with WalkON Suit F1
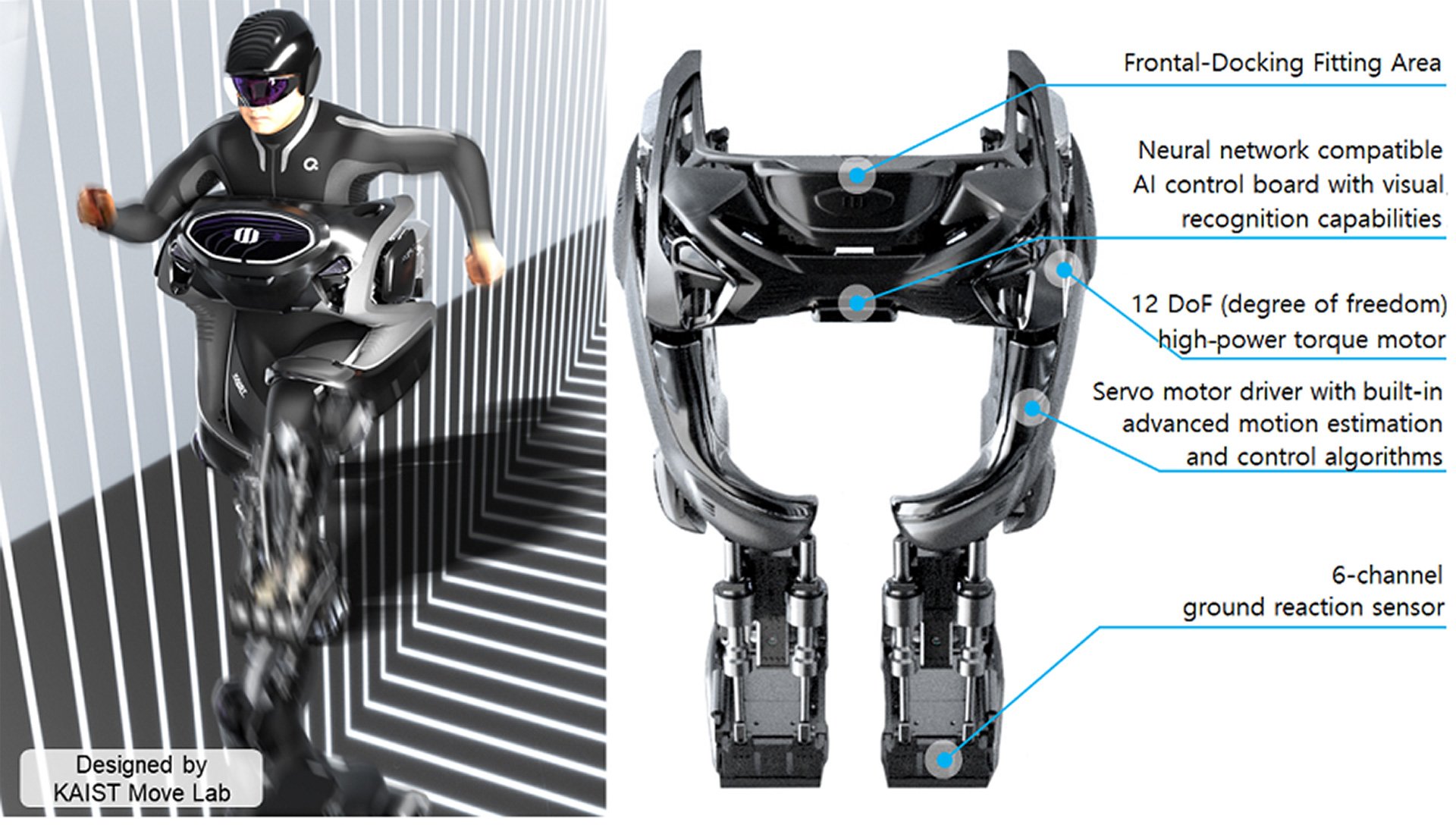
The latest version, WalkON Suit F1, takes a bold new approach with a “frontal-docking” method. Unlike previous models that required the user to get out of their wheelchair to wear the device, this version allows the user to dock with the robot directly from the front, without leaving the wheelchair. This enables a seamless and autonomous transition from wheelchair to wearable robot without needing assistance, which offers paraplegic users a level of independence previously unavailable in similar assistive technologies.

One of the most innovative features of the WalkON Suit F1 is its ability to autonomously approach the user, walk towards them, and position itself for docking. It incorporates advanced balance control technology that allows it to maintain stability even when interacting with users in real-time. This prevents the robot from tipping over and adds to its self-sufficiency as an assistive device. Additionally, the frontal-docking feature enables users to stand up and move freely with both hands available, a benefit the previous models did not offer.
Technological advancements and domestic production
WalkON Suit F1 also stands out due to its domestic production. In collaboration with Angel Robotics, KAIST has ensured that essential components of the WalkON Suit F1, including the motor, reducer, motor driver, and main circuit, are produced domestically. This approach not only bolsters local manufacturing capabilities but also results in several technical improvements in the robot’s core performance.
For instance, the power-to-weight ratio of the motor and reducer modules in the WalkON Suit F1 has nearly doubled compared to prior technology. Meanwhile, the motor driver control performance has improved roughly threefold, allowing the robot to respond faster than competing models from overseas. The software embedded in the robot has also seen notable enhancements, as it now supports complex motion control algorithms that were previously challenging to implement without high-end controllers. These improvements lead to a smoother and more stable user experience, which is especially beneficial in unpredictable environments.
Enhanced sensory capabilities with AI and visual recognition
The WalkON Suit F1 comes equipped with a visual recognition system and an AI board, which enhance its ability to detect obstacles and make quick adjustments in real time. These sensory capabilities allow the robot to navigate everyday environments and avoid potential hazards autonomously. This addition also marks a significant improvement over previous models, helping to provide a safer and more user-friendly experience for paraplegic individuals.

An industry standard in the making
According to Professor Kong from KAIST, the WalkON Suit represents “the culmination of wearable robot technology for the disabled.” He further noted, “The numerous components, control, and module technologies derived from WalkON Suit are setting the standard for the entire wearable robot industry.” This indicates KAIST’s goal of not only creating an innovative product but also setting a new benchmark in assistive robotics that other developers and manufacturers may follow.
Source: KAIST


{kind=link}